ЭЛЕКТРООБОРУДОВАНИЕ МОСТОВЫХ КРАНОВ(Страница: 11)
ЭЛЕКТРООБОРУДОВАНИЕ читать 3. ЭЛЕКТРИЧЕСКОЕ ОБОРУДОВАНИЕ КРАНОВ 11
Отношение максимального момента к номинальному в крановых электродвигателях типа МТ находится в пределах 2,5—3. Это позволяет двигателю наряду с кратковременной перегрузкой надежно работать при некоторых колебаниях напряжения сети, которое допускаетсянеболее 15%. Двигатели типа МТК имеют начальный пусковой момент в 2,6—3,2 раза большеноминального.Асинхронный двигатель имеет достаточно
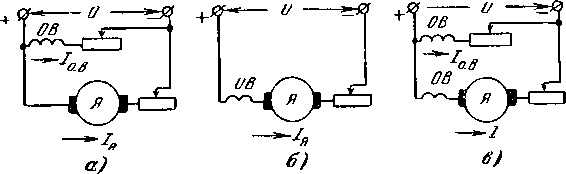
Рис. 11. Схемы соединения обмоток двигателей постоянного тока. а — параллельного; б — последовательного; в — смешанного возбуждения; Я — якорь; ОВ — обмотка возбуждения; U — напряжение сети; IЯ - ток якоря; Io.в. — ток обмотки параллельного возбуждения.
жесткую характеристику—мало изменяет скорость вращения при изменении нагрузки. В пределах нормальной нагрузки и допустимых перегрузок между током двигателя и нагрузкой на валу существует пропорциональная зависимость: с увеличением нагрузки двигатель потребляет из сети больший ток и большую мощность. При работе вхолостую асинхронный двигатель потребляет из сети намагничивающий ток, нужный для создания вращающегося магнитного поля. Намагничивающий ток у крановых двигателей переменного тока достигает 60—70% номинального тока при ПВ = 25%. Коэффициент мощности (косинус фи) асинхронных двигателей невысокий и при номинальной нагрузке равен 0,68—0,73.
Крановые двигатели постоянного токасостоят из индуктора, якоря с обмоткой и коллектором, щитов с подшипниками и щеткодержателями со щетками. Индуктор состоит из станины, главных и дополнительных полюсов с катушками. Станина предназначена для крепления на нейполюсов с катушками возбуждения, а также для прохождения через нее магнитного потокаполюсов. У двигателей четыре главных и четыре добавочных полюса. По способу возбуждения двигатели типа МП, КПДН и ДП изготовляют с последовательным, паралельным и смешанным возбуждением. Двигатели с последовательным возбуждением применяют главным образом на мостовых кранах; с параллельным и смешанным возбуждением — для вспомогательных механизмов металлургического производства и в системах электропривода генератор—двигатель. Схемы соединения обмоток двигателей постоянного тока показаны на рис. 11.
В двигателе параллельного возбуждения ток возбуждения независимо от нагрузки имеет постоянную величину, и это придает ему жесткую характеристику. Скорость вращения двигателя параллельного возбуждения почти не изменяется при изменении нагрузки на его валу. В двигателе последовательного возбуждения магнитный поток изменяется с изменением тока нагрузки, и это придает двигателю мягкую характеристику, его скорость значительно изменяется при изменении нагрузки. Так, например, крановый двигатель типа ДП-42 при мощности 40квтразвивает 490 об/мин, а при мощности 20квт— 680об/мин.Мягкая характеристика двигателей последовательного возбуждения наиболее подходит для крановых механизмов. Так, при работе с полной нагрузкой механизм будет двигаться со скоростью, предусмотренной паспортом двигателя, а при холостом ходе механизма, т. е. при малой загрузке, скорость возрастет в 1,5—2 раза. Это значит, что непроизводительный холостой пробег механизм выполнит быстрее, а это в свою очередь способствует повышению производительности труда. Однако двигатели последовательного возбуждения не могут работать совсем без нагрузки, так как в этом случае может произойти «разнос» двигателя, т. е. чрезмерное, опасное увеличение скорости вращения. Для предупреждения этого в схемах управления предусматривается включение добавочного сопротивления параллельно якорю двигателя. Двигатели постоянного тока позволяют регулировать скорость от нуля до номинальной величины при помощи добавочного сопротивления в цепи якоря.

Реклама
Новости

.jpg)
.jpg)
.jpg)

Статьи



О нас
«Дельта Авто» — мы созданы помогать людям. С нами Вы найдете своего верного соратника среди разнообразного множества домкратов, кранов и остального подъемно-транспортного оборудования. Мы отбираем наилучшую и качественную продукцию. «Дельта Авто» позаботиться о Ваших проблемах, благодаря нашему сайту — Вы сможете найти лучшего сотрудника и профессиональную компанию, готовую взяться за выполнение Вашей строительной мечты.