ЭЛЕКТРООБОРУДОВАНИЕ МОСТОВЫХ КРАНОВ(Страница: 25)
ЭЛЕКТРООБОРУДОВАНИЕ читать 4. ЭЛЕКТРИЧЕСКИЕ СХЕМЫ КРАНОВ 25
Смягчение механических характеристик двигателя способствует при возникновении механических перегрузок более плавной и безударной работе привода. По схеме предусмотрено два тормозных положения (торможение противовключением). В этих положениях спуска двигатель по схеме включен на подъем («Вперед»), но под действием тяжелого груза фактически происходит движение вниз. Создаваемый двигателем тормозной момент не дает в этом случае грузу падать. В электроприводе кранов с силовыми кулачковыми контроллерами, а также и с контакторными панелями (магнитными контроллерами) преобладает спуск груза со сверхсинхронной скоростью, т. е. чем больше сопротивление включено в роторную цепь, тем больше будет скорость одного и того же груза. Во избежание этого в панелях типаТСвыполнена блокировка блок-контактамиНи4У(8—27),не позволяющая отпасть контактору4У,пока не разорвется цепьК8или не отпадет контакторН.Для предупреждения включения контактораВпри полностью выведенном пусковом сопротивлении ротора служит включенный последовательно с катушкой контактаВблок-контакт контактора4У.Пока замкнут контактор4Уи зашунтировано почти все сопротивление роторной цепи, включить двигатель в тормозной режим невозможно (такое включение вызвало бы бросок тока и механический удар). В дальнейшем блок-контакт4Уразмыкается, но это не вызывает отключения двигателя, так как цепь уже зашунтирована блок-контактомВ (20—21).
Простейшим контроллером постоянного тока является кулачковый типа НП-101 (рис. 34), предназначенный для управления двигателями механизмов передвижения крана. Для отключения Двигателя от сети при срабатывании конечного выключателя, снижении напряжения и других причин, обычно служит линейный контакторЛ,установленный отдельно или являющийся частью защитной панели. Контакты1—2обеспечивают нулевую блокировку. При повороте маховика контроллера из нулевого в положение«Вперед»замыкаютсяконтакты4—5(вположении «Назад»— контакты3—4),чем создается цепь питания катушки контактораЛна все время, пока не разомкнуты контакты одного из конечных выключателейКВилиКН.После того как получила питание катушка контактораЛи этот контактор сработал, замкнется цепь тормозного магнита ШТМ и механический тормоз откроется. Если вместо магнитаШТМс параллельным питанием (шунтовой) применяется магнит с последовательным питанием катушкиСТМ(сериесный), то он присоединяется за обмоткойПОпоследовательного возбуждениядвигателя (показано на схеме пунктиром).
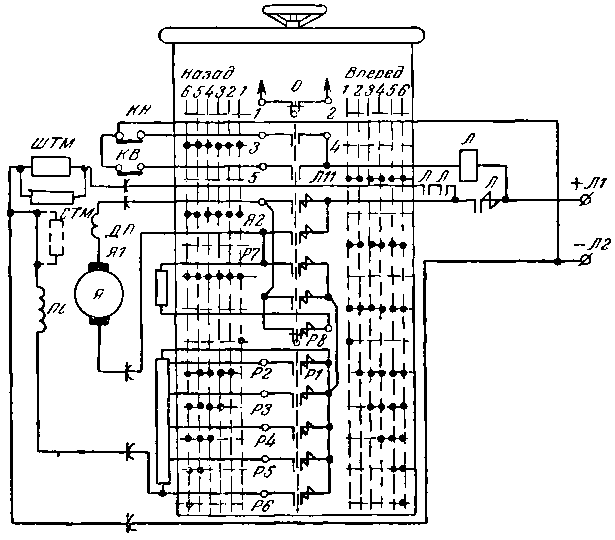
Рис. 34.Схема управления двигателями постоянного тока с помощью контроллера типа НП-101.
Помимовключения тормозного магнита происходят следующие процессы. Размыкается цепь электрического торможения, состоящая из обмотки якоря двигателяЯ2—Я1,обмотки дополнительных полюсовДПи сопротивленияР7—Р8.Создается цепь питания двигателя при движении впередЛ1—Л11—Я2—Я1—ДПсопротивлениеР1—Р6—обмотка возбужденияПО— тормозной магнитСТМ-Л2.При магнитеШТМего обмотка подключается через два контактаЛ(для облегчения условий разрыва) к сетиЛ1иЛ2.При движении назад меняется последовательность подключения якоряЛ1—Л11—ДП— Я1—Я2—Р1—Р6и т. д. Этим обеспечивается перемена направления вращения двигателя. При постепенном переходе с первого к последующим положениям контроллера вне зависимости от направления вращения постепенно шунтируются ступени сопротивленияР1—Р2, Р2—РЗ, РЗ—Р4, Р4—Р5, Р5—Р6.Таким образом, в шестом положении контроллера двигатель выходит на естественную характеристику.

Реклама
Новости

.jpg)
.jpg)
.jpg)

Статьи



О нас
«Дельта Авто» — мы созданы помогать людям. С нами Вы найдете своего верного соратника среди разнообразного множества домкратов, кранов и остального подъемно-транспортного оборудования. Мы отбираем наилучшую и качественную продукцию. «Дельта Авто» позаботиться о Ваших проблемах, благодаря нашему сайту — Вы сможете найти лучшего сотрудника и профессиональную компанию, готовую взяться за выполнение Вашей строительной мечты.