ЭЛЕКТРООБОРУДОВАНИЕ МОСТОВЫХ КРАНОВ(Страница: 32)
ЭЛЕКТРООБОРУДОВАНИЕ читать 5. РЕКОМЕНДУЕМЫЕ ИЗМЕНЕНИЯ В ЭЛЕКТРИЧЕСКИХ СХЕМАХ ДЕЙСТВУЮЩИХ КРАНОВ 32
Из схемы магнитного контроллера типа ТС (рис. 41) видно, что параллельно блок-контактам контакторовВиНкомандоконтроллера установлен блок-контактМконтактора магнита тормоза. Назначение его заключается в том, чтобы шунтировать контакты В и Я во время перехода от тормозного спуска к силовому спуску с целью исключения «прыгания» тормоза. Использование контактовМв качестве шунтирующих, а также в качестве самоподпитки катушки контактора магнита тормоза, исключает из схемы действие контакта Я, так как катушка контактора магнита запитывается в первом положении контроллера на подъем через контактыВи на других ступенях подъема питается через свои блок-контакты, аналогично при спуске во втором положении контроллера запитывается через контактыВи становится на самоподпитку. Таким образом, самоподпитка катушки управления контактора магнита независимо от положения контакторовВиНможет привести к аварии. Например, в случае нарушения цепи управления контакторовВиН,что возможно вследствие подгорания контактов, в результате чего эти контакты (вернее, один из них) отпадет, подача напряжения на двигатель прекращается, а тормоз в действие не придет, так как катушка контактора магнита запитывается через свои блок-контакты. Груз под действием веса начнет самопроизвольно опускаться вниз. Указанная схема опасна,так как любое отключение контакторовНиВдолжно сопровождаться срабатыванием тормоза, а при такой схеме это не всегда возможно. Чтобы не возникла такаяопасность, необходимо снять перемычку на участке, который отмечен знаком X. После такой переделки схемы при отпадании контактора В и Н в случае неисправности цепи управления обязательно будет срабатывать тормоз.
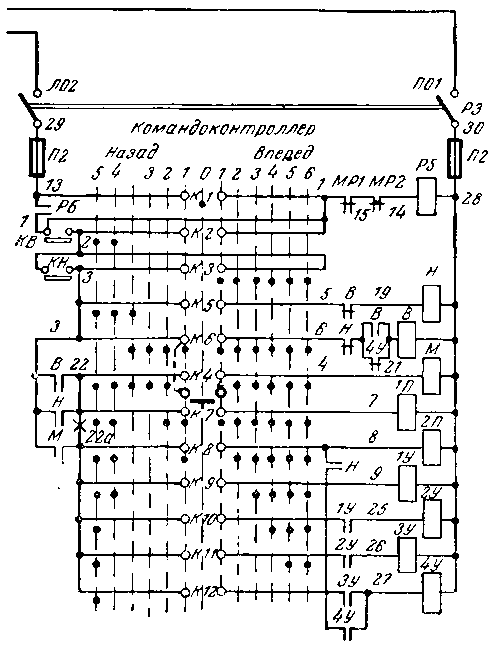
Рис. 41. Измененная схема магнитного контроллера ТС.
Перечисленные выше изменения электрических схем направлены в основном на обеспечение безопасной работы кранов. Иногда возникает необходимость изменения схемы для повышения производительности труда или экономии электроэнергии. Примером может служить получениевозможности опускания грефера при неработающем двигателе. Согласно существующему положению, механизмы подъема груза должны снабжаться тормозами замкнутого типа, автоматически размыкающимися при включении и замыкающимися при выключении привода. В схемах тормозные катушки подключены в большинстве случаев параллельно обмоткам статора двигателя. У грейферных двухбарабанных лебедок с раздельным электроприводом на механизме поддерживающего барабана допускается устройство педали (кнопки) для растормаживания барабана при неработающем двигателе. Это можно осуществить в схеме управления двигателем при помощи магнитного контроллера типа ТС.
Как видно из рис. 41, катушки тормоза подключены в силовую цепь до контакторовН иВ.Тормозной магнит включается при помощи контактораМ.При переводе рукоятки командоконтроллера в положение спуска включается контакторН,подключаются контакторыМи1П,тормоз растормаживается, и происходит опускание грейфера. При установке рукоятки в нулевое положение контакторыНиМотпадут и механизм остановится. Если установить перемычку и ножную педаль, как показано пунктирной линией на рис. 41, то нажатием на педаль во время начала опускания грейфера и установкой рукоятки командоконтроллера в нулевое положение можно, выключив двигатель, оставить тормоз в расторможенном состоянии и продолжать опускание грейфера при выключенном двигателе. При нажатии на педаль без предварительного включения двигателя движения не произойдет. При срабатывании электрической защиты тормоз автоматически замкнется, даже если педаль будет нажата, так как питание катушек тормоза осуществляется после катушек максимального реле. Таким образом, можно производить работу грейфером, экономя электроэнергию.

Реклама
Новости

.jpg)
.jpg)
.jpg)

Статьи



О нас
«Дельта Авто» — мы созданы помогать людям. С нами Вы найдете своего верного соратника среди разнообразного множества домкратов, кранов и остального подъемно-транспортного оборудования. Мы отбираем наилучшую и качественную продукцию. «Дельта Авто» позаботиться о Ваших проблемах, благодаря нашему сайту — Вы сможете найти лучшего сотрудника и профессиональную компанию, готовую взяться за выполнение Вашей строительной мечты.